Architecture Design and Engineering Practice of Multi-Axis Servo Motor Drivers Based on ZYNQ MPSoC
1. Introduction
In high-precision industrial applications such as industrial robots, CNC machine tools, missile actuators, phased array antennas, and automated production lines, the core requirement is independent control + high-precision synchronization of multi-axis servo motors.
Currently, two mainstream traditional solutions both face clear bottlenecks:
- Pure DSP Software Approach: Serial interrupt execution limits performance; single DSP computing power is insufficient for high-precision multi-axis control. Multi-DSP parallel configurations are costly, have low integration, and suffer from inter-axis desynchronization.
- Pure FPGA Hardware Approach: Offers strong parallel real-time performance, but speed and position loop algorithms are hard-coded into hardware, resulting in poor versatility and inflexible parameter configuration or algorithm iteration.
The emergence of MPSoC (Multi-Processor System-on-Chip) perfectly addresses these pain points. By leveraging an ARM + FPGA/DSP heterogeneous architecture with software-hardware co-design, all functions—main control, multi-axis servo control, industrial communication, and signal acquisition—are integrated within a single chip. This approach combines high real-time performance, high synchronization accuracy, algorithm flexibility, and high integration.
This article comprehensively dissects the MPSoC-based multi-axis servo architecture, design methodology, experimental results, and hardware platform adaptation, based on academic engineering test cases and industrial deployment experience. It serves as a valuable reference for engineers working in motion control, servo drive, and FPGA/MPSoC hardware development.
2. Comparison and Pain Points of Traditional Multi-Axis Servo Solutions
2.1 Advantages and Disadvantages of Three Mainstream Approaches
| Solution Type | Advantages | Critical Drawbacks |
|---|---|---|
| Single DSP Solution | Simple development, flexible algorithms, low cost | Poor real-time performance due to serial processing; weak multi-axis synchronization; unsuitable for high-precision multi-axis control |
| Pure FPGA Hardware | Parallel computing, ultra-low latency; ideal for current loop | Speed/position loop algorithms are fixed; difficult to modify parameters; poor generalization |
| Discrete DSP + FPGA | Clear division of labor; acceptable performance | Complex PCB wiring, high interference, low integration, large footprint |
2.2 Real Industry Requirements
- Single-chip implementation of multi-axis independent operation without interference + precise synchronization
- Microsecond-level low latency for current loop; fast speed loop response with minimal steady-state error
- Software and hardware modularity for post-deployment algorithm upgrades and online parameter configuration
- Native support for EtherCAT, CAN, Ethernet, and differential encoder interfaces
These requirements make the MPSoC heterogeneous architecture the optimal solution for multi-axis servo systems.
3. Overall Architecture Design of MPSoC-Based Multi-Axis Servo System
3.1 Core Design Principle: Software-Hardware Co-Design and Task Division
This is the most critical design principle for implementing multi-axis servo control on MPSoC:
-
FPGA Logic Handles Fixed, High-Real-Time Tasks:
Current vector control, Clark/Park inverse transformation, CORDIC sine/cosine computation, phase current AD acquisition, encoder position/speed calculation, and SVPWM waveform generation.
Control frequency can reach 100kHz with minimal latency. -
ARM / Soft-Core Software Handles Flexible, Iterative Tasks:
Speed loop PID, position loop closure, multi-axis trajectory planning, host communication, inter-core data exchange, parameter configuration, and fault logic.
Control frequency at 25kHz, enabling easy algorithm modification and parameter tuning.
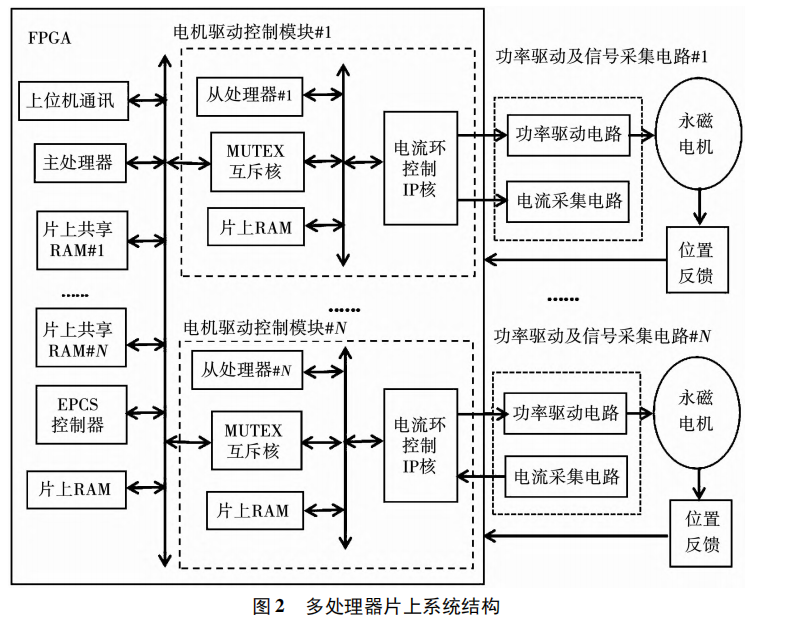
3.2 Overall Block Diagram of MPSoC On-Chip System
plaintext
Host Communication Module ↓
Main Processor ←→ MUTEX Core ←→ On-Chip Shared RAM
↓
┌─────┬─────┬─────┐
│Slave│Slave│Slave│ Multi-Axis Slave Processor Array
│Core1│Core2│CoreN│
└─────┴─────┴─────┘
↓ ↓ ↓
Current IP1 Current IP2 Current IPN
↓ ↓ ↓
Power Driver & Signal Acquisition → Permanent Magnet Synchronous Motor
Architectural Highlights
- All control executed internally within a single FPGA/MPSoC—no external multi-chip interconnect required;
- Each motor has its own dedicated control module, enabling parallel, interference-free operation;
- MUTEX core + shared RAM ensures conflict-free multi-core communication and high synchronization accuracy;
- Standard modules pre-integrated: EPCS configuration, PLL clock, JTAG debugging, industrial Ethernet ports.
3.3 Internal Structure of Single-Axis Servo Control Module
Single-axis module components: Slave processor + On-chip RAM + Current loop hardware IP core + Bus interface
- Current Loop IP: Implemented in Verilog, modularly encapsulated, directly reusable;
- Slave Processor: Developed in C, responsible for speed loop PID, interrupt scheduling, and interaction with IP core;
- On-Chip RAM: Stores program and runtime variables, ensuring real-time loading and computation.
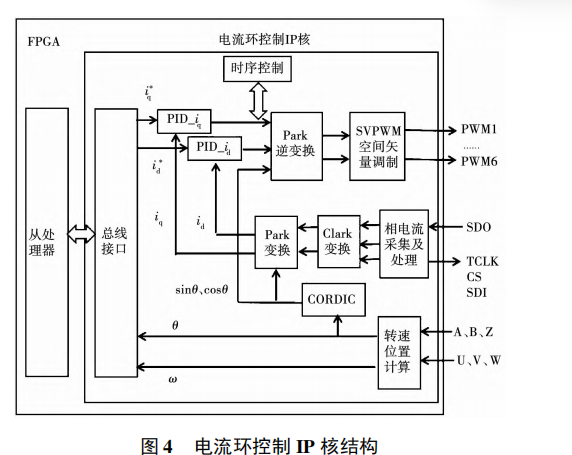
3.4 Internal Timing Flow of Current Loop IP Core
Sampling → Phase Current Processing → Clark Transform → Park Transform → Current PID → Inverse Park → SVPWM → PWM Output
Simultaneously in parallel: Encoder decoding, angle/speed calculation, CORDIC sine/cosine solving.
Entire process executed via hardware pipeline, achieving significantly lower latency than software implementation.
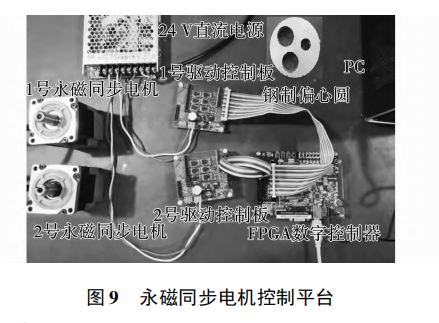
4. Hardware Setup of Experimental Platform
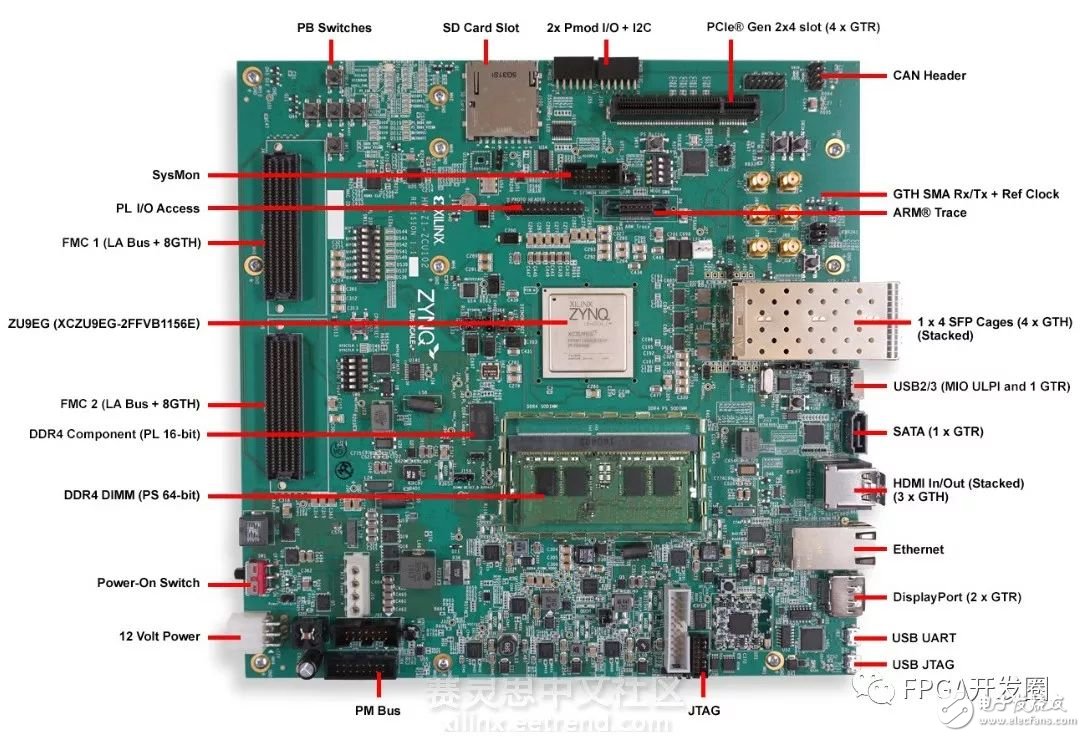
4.1 Main Control MPSoC Chip
Adopted Intel Cyclone V 5CEBA4F23C7N MPSoC
- Logic Resources: 49K LE
- System Clock: 50MHz
- Dual-axis servo control consumes only 32% of logic resources, leaving ample headroom for smooth expansion to 4, 6, or 8 axes.
The design is also fully compatible with other MPSoC/DSP+ARM+FPGA platforms such as Xilinx Zynq7020/7045, TI AM5728, AM62x, OMAPL138.
4.2 Experimental Hardware Components
- Servo Motor: 200W surface-mounted permanent magnet synchronous motor
- Power Supply: 24V DC
- Peripherals: Driver board, current sensing circuit, incremental optical encoder, steel eccentric load
- Host Computer: PC for speed profile monitoring and parameter tuning
4.3 Key Control Parameters
- Current Loop Frequency: 100kHz
- Speed Loop Frequency: 25kHz
- Supported Axis Count: 2–8 axes, flexibly configurable via software and hardware
5. Measured Waveforms and Performance Results
5.1 No-Load Trapezoidal Speed Response
- Axis 1: Trapezoidal speed from 600r/min → 1000r/min
- Axis 2: Reverse trapezoidal speed from -600r/min → -200r/min
Measured Performance
- Speed reference and feedback curves nearly overlap, with minimal lag;
- Steady-state speed error: 0.25% for Axis 1, 0.32% for Axis 2;
- Dual-axis independent operation with excellent synchronization and no interference.
5.2 Dynamic Response Under Load
With steel eccentric load applied, commanded speed ±1000r/min:
- Dynamic response time: 17.3ms (Axis 1), 18.5ms (Axis 2);
- Minor overshoot under load, quickly converging;
- Steady-state error controlled at 1.13% and 1.35%;
- Current loop responds rapidly with no significant oscillation and ultra-low latency.
5.3 Summary of Core Advantages
- High Integration: Single MPSoC replaces discrete multi-DSP+FPGA solutions, significantly reducing device size;
- High Real-Time Performance: Microsecond-level latency in hardware current loop, suitable for high-speed, high-precision servo;
- Easy Scalability: 2, 4, 6, or 8 axes can be flexibly configured via board resources and logic;
- Easy Iteration: Speed loop and trajectory algorithms developed in software layer—upgradable without modifying hardware logic;
- Industrial-Grade Reliability: Supports wide temperature range, anti-interference, EMC, and industrial bus networking.
6. Key Considerations for MPSoC Multi-Axis Servo Industrial Motherboard Adaptation
For motion control and servo equipment manufacturers, the biggest pain point is long development cycles for in-house MPSoC motherboards, complex low-level drivers, and mismatched interfaces.
From an engineering deployment perspective, key aspects of customizing MPSoC-based multi-axis servo industrial motherboards include:
-
Custom Chip Selection: Based on Zynq, Cyclone, TI AM5728/AM62x/OMAPL138, etc., adopt core board + base board architecture tailored for 2–16 axis servo control.
-
Customizable Interfaces: Include differential encoder interfaces, high-speed AD current acquisition, PWM drive interfaces, Gigabit EtherCAT, CAN-FD, RS485, multiple serial and Ethernet ports.
-
Resource and Cost Optimization: Match DDR, eMMC, and FPGA logic resources to axis count—avoid hardware waste and control overall system cost.
-
Industrial-Grade Reliability: Support -40°C to +85°C wide temperature range, shock/vibration resistance, dual power redundancy, EMC compliance—meeting standards for machine tools, robotics, rail transit, and power industries.
-
Turnkey Software-Hardware Delivery: Pre-integrated with Linux/RT-Linux/TI-RTOS real-time operating systems, low-level drivers, and multi-core communication frameworks. Customers can focus solely on upper-layer motion control algorithms and application logic, reducing development cycles from 1–2 years to under 3 months.
Such MPSoC heterogeneous motherboards have already been deployed in volume across applications including 6-axis industrial robots, EtherCAT motion controllers, CNC machine tools, AGV logistics robots, and precision inspection equipment.
7. Conclusion
The MPSoC heterogeneous architecture has become the mainstream technical approach for multi-axis servo drives, thanks to software-hardware co-design, high single-chip integration, strong real-time performance, and flexible scalability.
By placing fixed, high-real-time algorithms in FPGA hardware and complex, iterative algorithms in ARM/DSP software, this architecture ensures both low control latency and high synchronization accuracy, while preserving the ability to upgrade algorithms and configure parameters flexibly.
For industrial automation, motion control, and servo equipment manufacturers, secondary development based on mature MPSoC industrial motherboards represents the optimal choice to reduce costs, shorten development cycles, and improve system stability.
Sienovo provides ZYNQ MPSoC motherboard solutions and manufacturing services.