ZYNQ ARM+FPGA+AI Multi-channel Ship Noise Acquisition System: High Precision, High Real-time, Supporting Edge AI Analysis
With the advancement of electronic communication and automation technologies across various sectors, ships, while ensuring fundamental maritime safety and transportation security, are increasingly emphasizing providing a more comfortable and healthier navigation environment for crew and passengers. Against this backdrop, effective acquisition and control of ship noise have become essential for addressing these concerns. This paper proposes a multi-channel ship noise acquisition system based on the ZYNQ platform, tailored to the demands of ship automation and intelligence. The ZYNQ architecture, with its synergistic soft-core and hard-core capabilities, high-speed data processing, compact size, and low power consumption, is highly suitable for such applications. This system enables real-time, high-speed, and accurate acquisition of ship noise, thereby providing reliable data support for subsequent noise processing and control, enhancing navigation safety, and improving passenger comfort. This system design not only boosts the efficiency of noise management but also contributes to elevating the overall quality of ship operations, offering a superior navigation environment for those on board.
Ships contain a wide variety of internal machinery and possess complex hull structures. During operation, power machinery vibrations directly radiate into the air, generating airborne noise. These vibrations also propagate along the ship's structure throughout the entire hull, subsequently radiating outwards as structural noise. Furthermore, the hull's vibrations radiate into the water, producing underwater noise [2~3].
Real-time, high-speed, and accurate acquisition of ship noise signals is the fundamental starting point for ship vibration reduction, noise mitigation, and fault diagnosis. For the three distinct types of noise encountered in ships—airborne noise, underwater noise, and vibration noise—corresponding sensors can be selected for precise measurement. Specifically, microphones can be used to measure airborne noise, accelerometers are suitable for capturing noise generated by vibrations, and hydrophones are specifically designed for detecting underwater noise. By employing these three specialized sensors, various types of ship noise can be effectively measured and analyzed in detail [4]. Subsequently, an acquisition system is designed to convert these electrical signals, after conditioning, acquisition, quantization, and encoding, into computer-recognizable digital signals [5].
ZYNQ series chips integrate two core components: the Processor System (PS) and the Programmable Logic (PL). The processor chip is an ARM dual-core processor, while the programmable logic chip utilizes Xilinx's 7-series FPGA architecture to build a full-featured System-on-Chip. This combination not only optimizes hardware processing capabilities but also enhances system flexibility and versatility, making the ZYNQ series an ideal choice for various complex digital computing requirements [10]. The ARM processor offers powerful software programmability, while the FPGA provides robust hardware programmability. ZYNQ achieves a clever and efficient integration of these, and it also supports high-speed interfaces, enabling efficient implementation for applications requiring high-speed data transfer. Compared to traditional separate ARM and FPGA configurations, ZYNQ adopts a "baseboard + core board" hardware design, achieving higher integration. This optimizes the volume of the acquisition system while maintaining flexibility and scalability [11]. When designing an efficient data acquisition and processing system, especially during the multi-channel input signal acquisition and pre-processing stages, the FPGA's high-speed parallel processing capability is leveraged to execute real-time tasks. The ARM processor acts as the system's control core, responsible for scheduling the entire system, including issuing acquisition commands, receiving data, and uploading data. Furthermore, the ARM processor's flexibility allows the entire system to be configured according to specific needs, making it easy to expand with new functionalities. This paper combines the advantages of ZYNQ with system requirements, proposing a design scheme that applies the ZYNQ platform to a multi-channel ship noise acquisition system, achieving multi-channel acquisition and transmission of ship noise.
2 Overall Design Scheme for the Multi-channel Ship Noise Acquisition System
As shown in Figure 1, the overall system structure primarily consists of four parts: noise detection sensors, a signal conditioning unit, a signal acquisition and transmission unit, and a host computer. In this configuration, noise sensors are responsible for real-time monitoring of noise levels within compartments and transmitting the acquired signals to the signal conditioning unit. The signal conditioning unit performs processing such as gain switching, low-pass filtering, and pre-amplification for signals provided by different sensors, to provide appropriate pre-processing for the Analog-to-Digital Converter (ADC) sampling. Subsequently, the ADC is responsible for converting continuous analog signals into discrete digital signals. The converted digital signals are received by the ZYNQ's PS (Processor System) side. After parsing commands from the PC, they are transmitted via ZYNQ's internal AXI bus to the ZYNQ's PS side, where ADC control and sampled data reception are managed. Upon completion of these steps, the acquired data is sent to the PC via an Ethernet communication interface for further analysis and processing. This design not only ensures the efficiency and accuracy of data acquisition but also enhances the system's responsiveness to different noise types and its processing speed, enabling reliable operation in various application environments.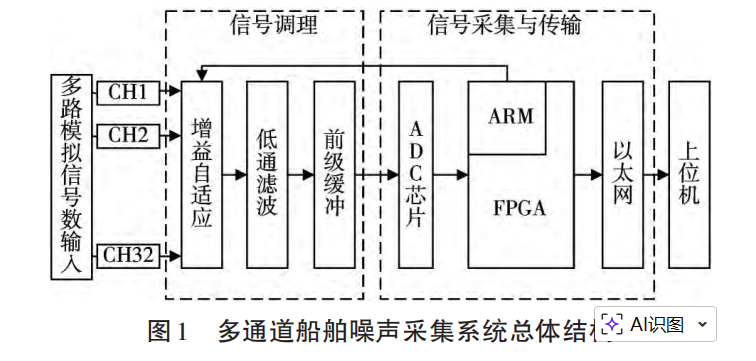
4 System Software Design
Upon system power-up, the ARM processor first performs self-initialization to ensure that all system modules operate correctly. After initialization, the ARM processor enters a standby state, ready to receive acquisition control commands from the PC. Whenever the ARM processor receives a command from the PC, it first performs a detailed parsing of the command content. Based on the parsing result, it controls analog switches to adjust the gain of the specified channel, thereby meeting the processing requirements of different input signals. Next, the ARM generates corresponding sampling control commands and sends them to the FPGA. Subsequently, the ARM continues to await the next command from the PC. If no commands are received from the PC during this process, the ARM needs to check if the FPGA is transmitting data. If the ARM receives data from the FPGA, it will forward this data to the host computer via the Ethernet interface for further processing. This ensures that data can be transmitted to the host computer in a timely manner for subsequent analysis and processing. If no data is received, the ARM will continue to wait for acquisition control commands from the PC.
At the FPGA end, upon receiving the acquisition control command from the ARM, it performs corresponding protocol parsing. These protocols include key parameters such as the specified acquisition channel and data output rate. Based on these parameters, the FPGA will perform necessary initialization configurations for the AD7768 as required, ensuring it operates normally according to predetermined parameters and requirements to begin executing data acquisition tasks. Concurrently, it starts receiving data acquired from the AD7768, and this data is stored in SDRAM for subsequent processing and access. This ensures that data is properly preserved after reception, facilitating subsequent operations and use. Once the accumulated data volume reaches a predetermined magnitude, the FPGA transmits the data back to the ARM via an interface, thus completing the entire data acquisition and control process. The configuration and data flow of this process are detailed in Figure 5.
5 Conclusion
The multi-channel noise acquisition system developed in this research is designed based on the ZYNQ platform, combining the high hardware programmability of FPGA with a complete ARM processor system. A significant feature of this system is the fast and very stable data transfer speed between the ARM processor and the FPGA. This efficient interaction mechanism not only simplifies the development process and reduces development complexity but also significantly shortens the overall project development time, making the system easier to implement and optimize. Furthermore, this design supports convenient expansion of various peripherals. The collaborative operation of the Processor System (PS) and Programmable Logic (PL) within the ZYNQ platform ensures efficient instruction parsing and data transmission, thereby providing robust assurance for the rapid and reliable transfer of noise data to the PC. In practical applications, this system demonstrates broad potential, not only advancing noise detection technology but also opening up more possibilities for engineering applications in related fields. These advantages make this system particularly valuable in noise-intensive industries such as shipping, effectively assisting engineers and researchers in more precise noise analysis and control.
Sienovo offers ZYNQ customization services.
