EV Charger Fast Charging CAN Simulation and GBT27930 Fast Charging CAN Test
Background of Power Battery Fast Charging CAN Test
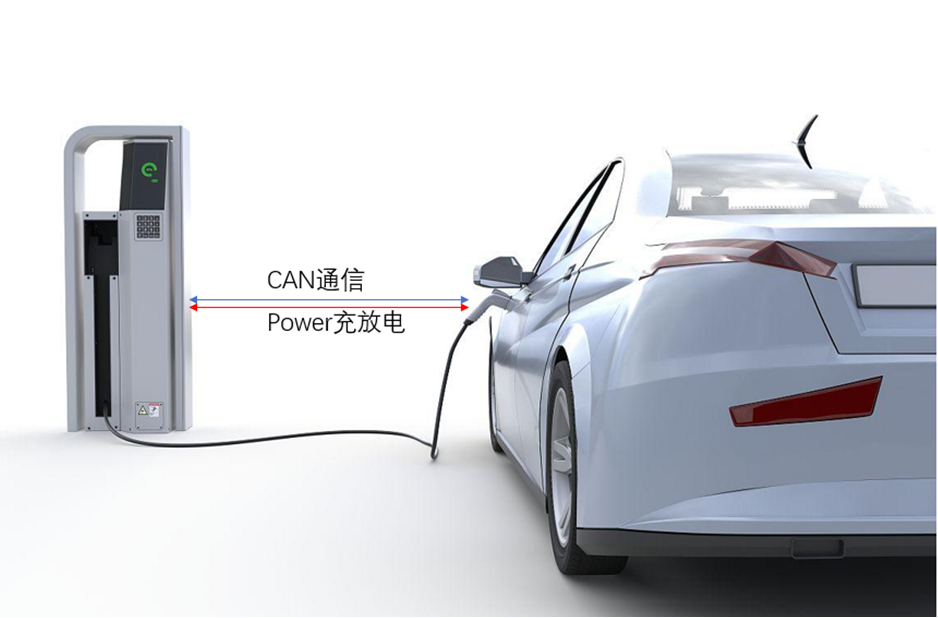
During the charging process, new energy electric vehicle power batteries need to communicate interactively with the charging pile. Through handshake protocols and information exchange, they coordinate information such as the required charging voltage and current, as well as handling measures for errors or severe faults that may occur during charging. To standardize the market, the National Standardization Administration Committee has issued a series of national standard documents. Among these, the interactive communication protocol between the Battery Management System (BMS) of electric vehicles and DC fast charging piles (Chargers) is regulated by the national standard GBT-27930. National standard GB27930 stipulates that the communication bus for power battery fast charging protocol is a standard CAN bus, with an I/O mode of CAN2.0 and a baud rate of 250kbit/s. Communication handshake and information exchange must comply with a series of process specifications and time limits.
Fast Charging Test Requirements and Pain Points
Fast charging communication for power battery packs is a crucial component of new energy electric vehicles' daily operation, and its communication reliability requirements are very high. To verify the response characteristics and long-term stability of power battery fast charging communication, dedicated test hardware and software are required. Furthermore, it often requires sampling a large number of units and configuring multiple test systems for long-term durability testing. Due to the stringent logic of fast charging communication, complex and variable response characteristics, and high message synchronization requirements, using ordinary, relatively unstable hardware or software with potential packet loss issues can lead to inaccurate test results. However, hardware that meets high stability requirements and software capable of timely and complex responses are typically expensive, resulting in significant costs in batch testing scenarios.
Fast Charging Solution Overview
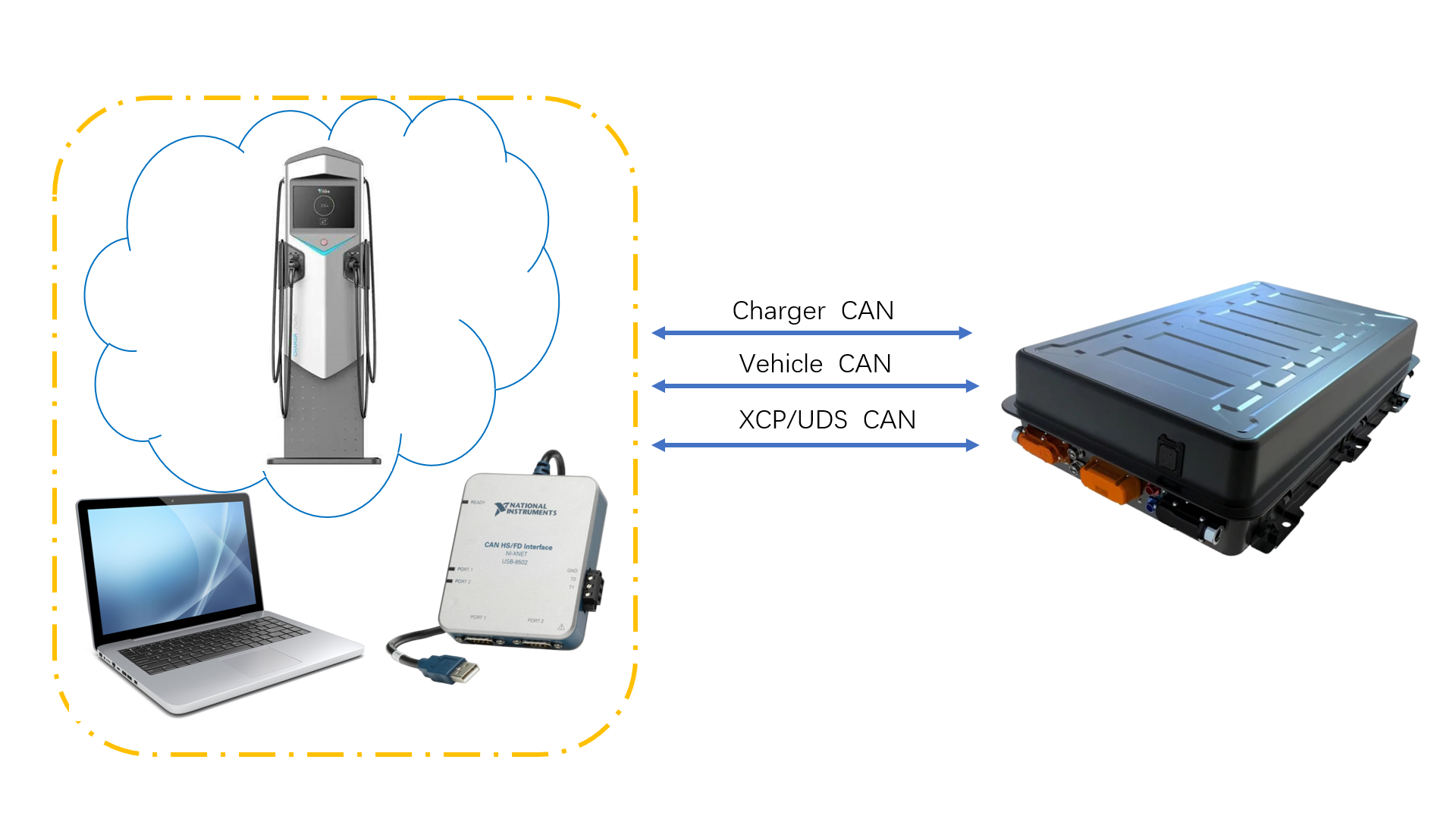
Our independently developed CAN simulation and monitoring system is based on GBT-27930 protocol requirements. It simulates the charging pile via PC software and interacts with the BMS through a CAN hardware port to control the power battery into a fast charging state. This enables reliability and durability testing for power battery fast charging communication. The system utilizes NI CAN communication cards (USB/PCIe/PXIe options available) from the US, combined with professional software architecture and data management technology, to comprehensively ensure system stability and data reliability across hardware, drivers, memory, transmission, display, and storage.
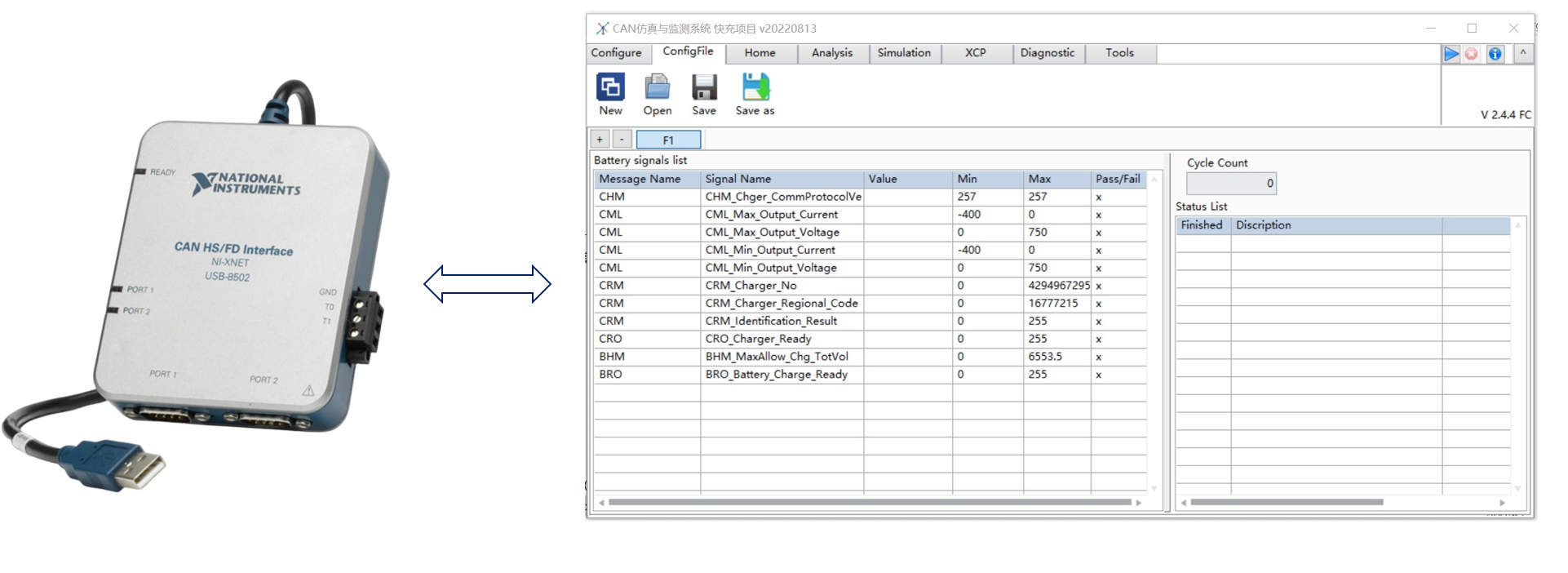
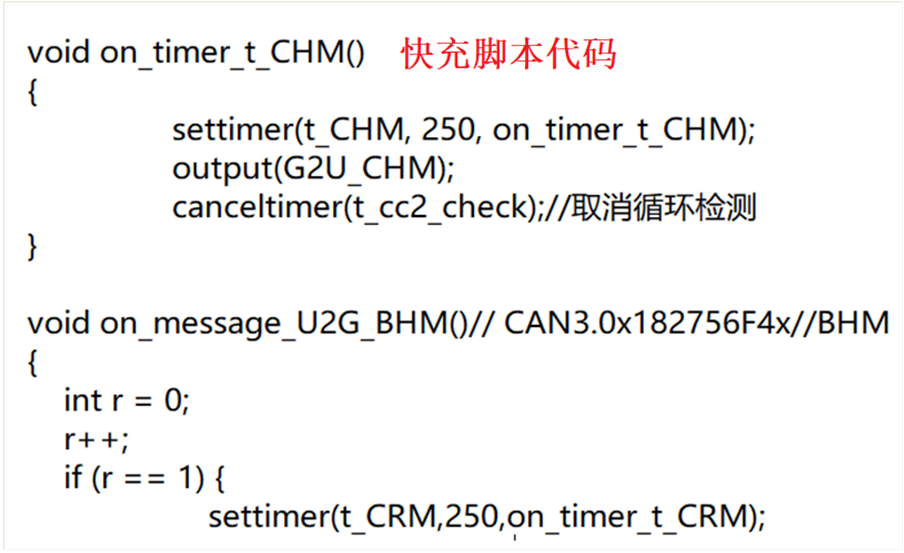
We provide ready-to-use parameter configurations and CAPL-like script code. Users can perform fast charging communication tests for power battery packs simply by importing configurations, without needing to program. Subject to cooperation terms, relevant source code can be made available for users to modify parameters and adapt to different types of battery packs.
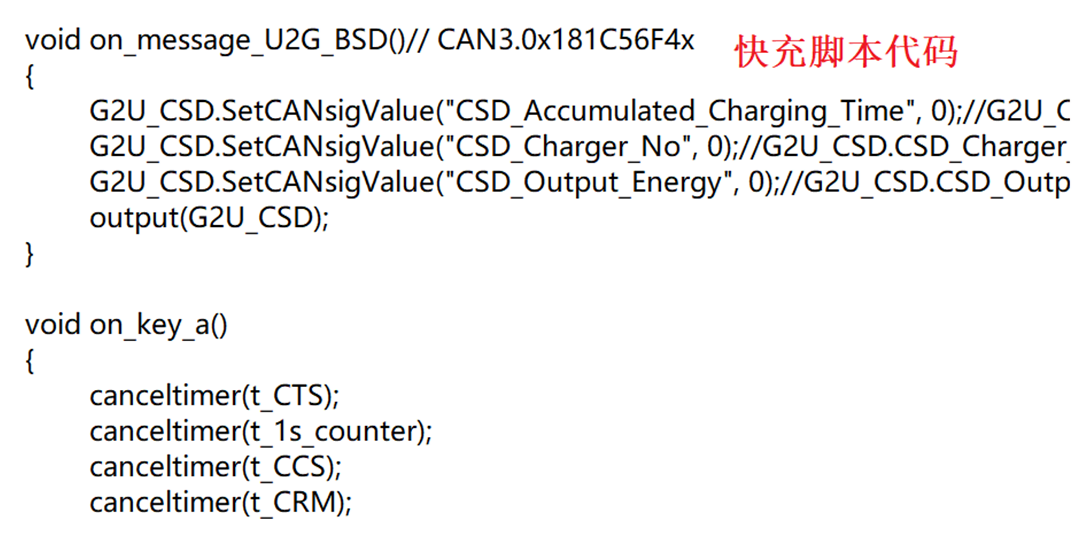
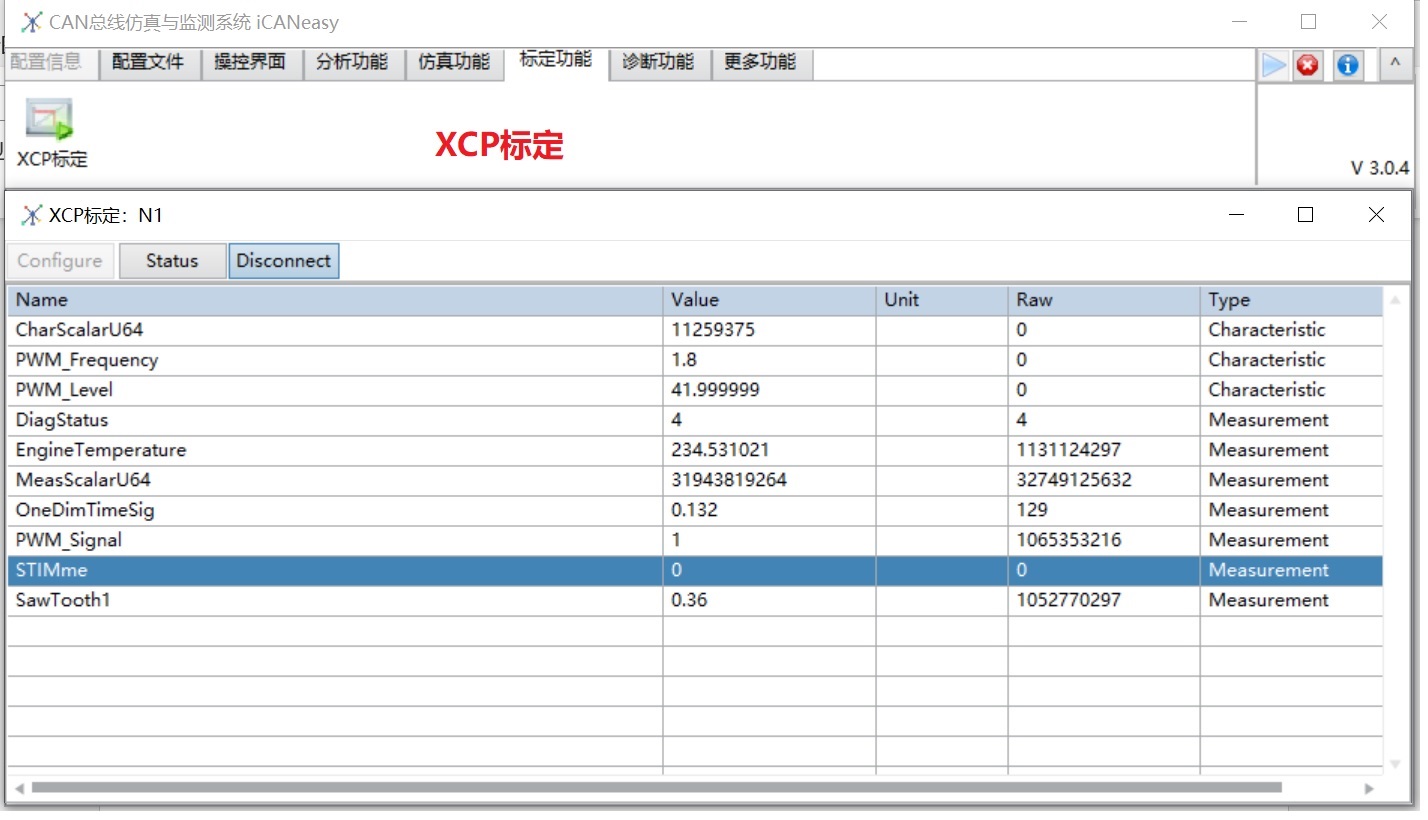
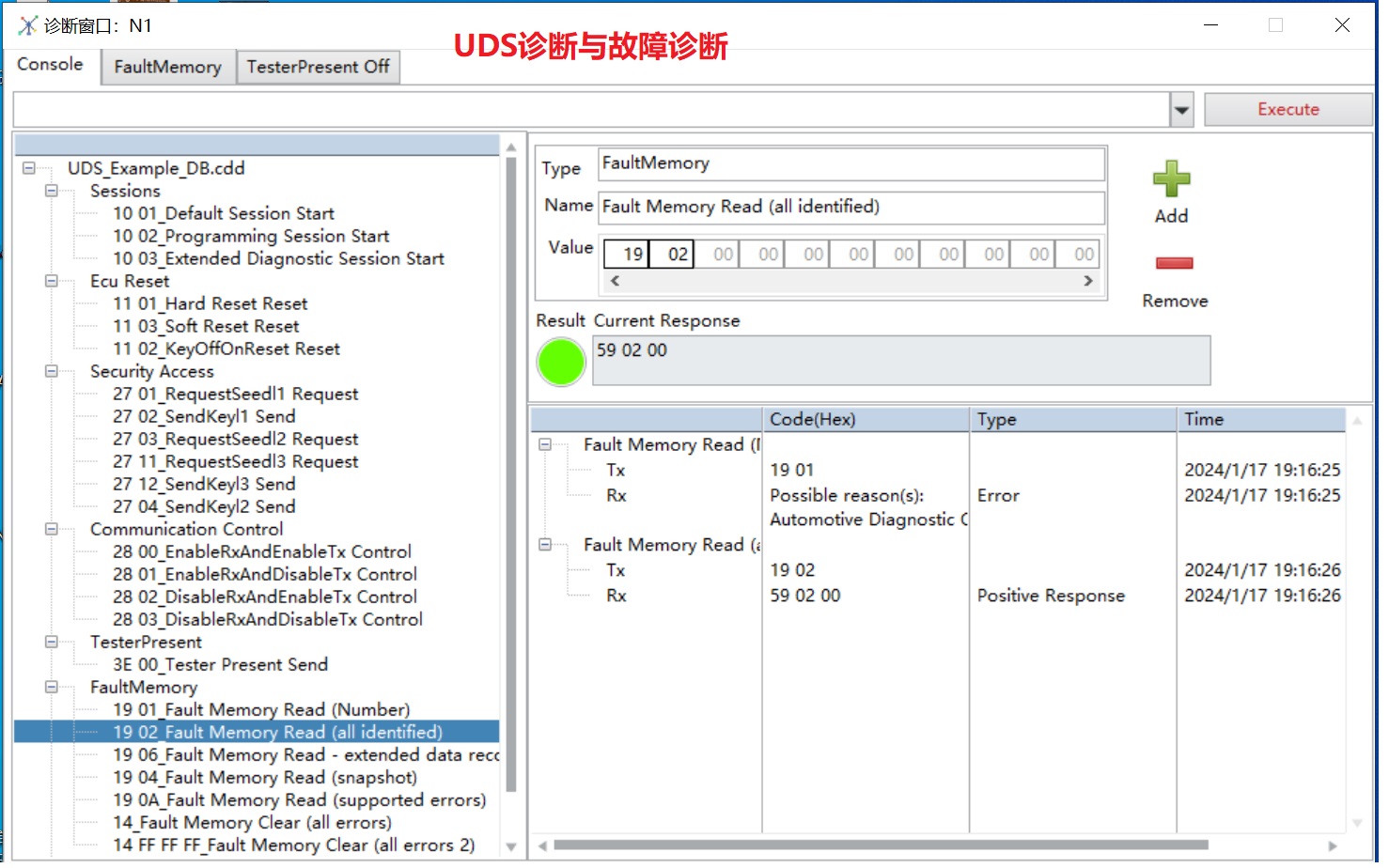
The software can simultaneously monitor BMS response characteristics, record all interactive messages, and store them as data files in formats such as blf/asc/mdf4. The system also supports multiple CAN channels. Users can configure other bus simulation and monitoring functions on other CAN channels simultaneously, or configure functions such as XCP calibration, UDS, and fault diagnosis.

Reasons to Choose Our Product
- Fully compliant with national standard GBT-27930, highly versatile, suitable for various fast-charging battery types.
- Based on imported hardware platforms, stable and reliable, meeting long-term operation requirements.
- Source code can be made available, allowing users to easily modify parameters to adapt to different battery models and vehicle types.