Industrial Automation Control Board Solution Based on RK3576+MCU+FPGA
The following is a comprehensive analysis of the industrial automation control board solution based on RK3576+MCU+FPGA, combining heterogeneous computing architecture with real-time control technology:
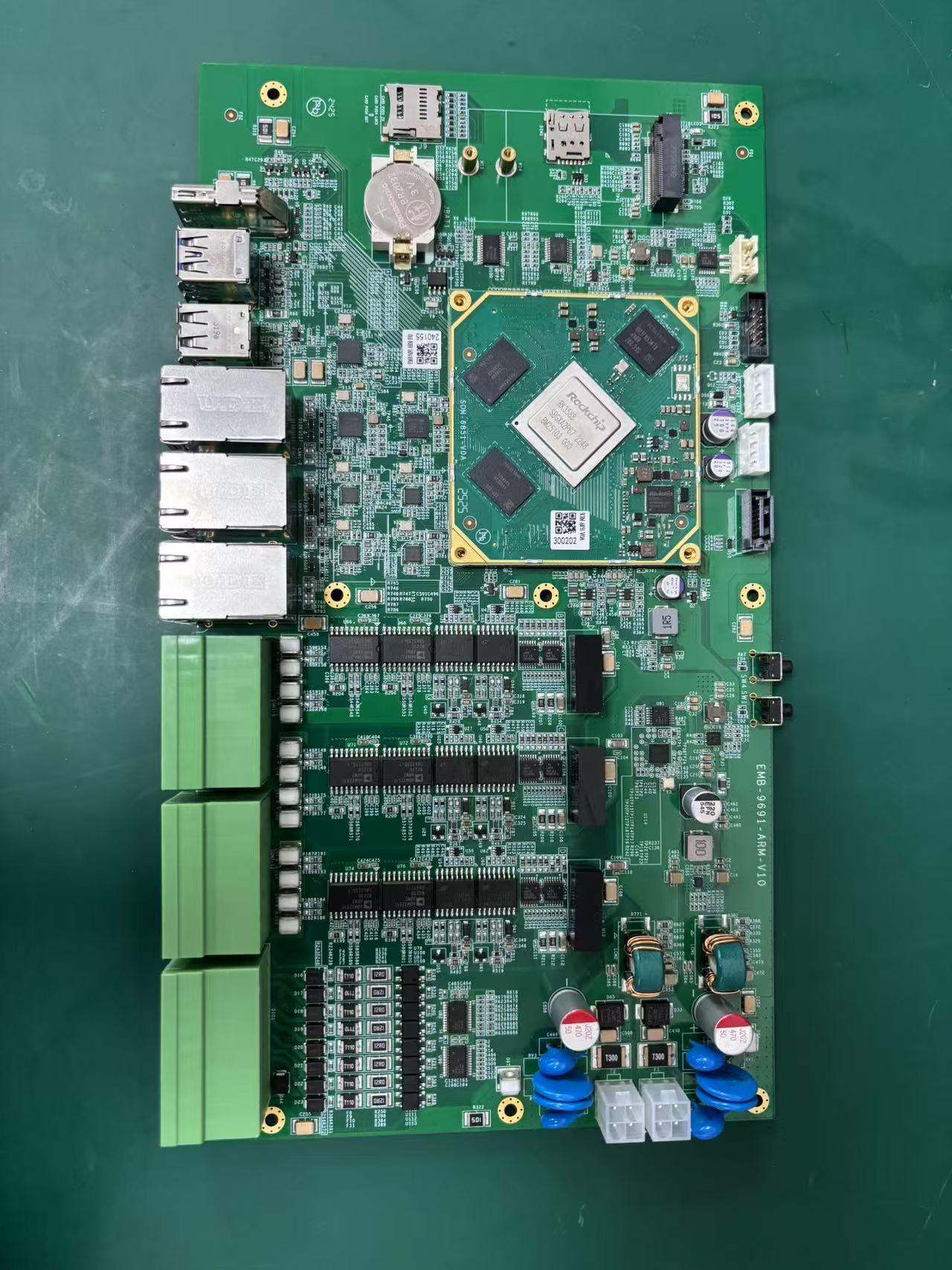
I. Hardware Architecture Design
-
Heterogeneous Computing Core
- RK3576 Main Controller: Quad-core Cortex-A72 (2.3GHz) handles path planning and AI vision tasks; Quad-core Cortex-A53 (2.2GHz) runs multi-sensor fusion algorithms (e.g., IMU/GPS data synchronization); built-in Cortex-M0 hard real-time core achieves microsecond-level PID control (20μs cycle)12.
- FPGA Expansion: Connects FPGA (e.g., Anlogic PGL25G) via PCIe x4 or FlexBus interface to achieve hardware acceleration tasks (e.g., LiDAR point cloud filtering, encoder signal decoding), with a data exchange rate of up to 280MB/s34.
-
Industrial Interface Configuration
- Natively supports dual CAN-FD (5Mbps), 16-channel PWM (100kHz), and 8-channel 24-bit ADC (±0.05% accuracy), suitable for servo drives and high-precision data acquisition14.
- Extended MIPI CSI-2 interface supports 4K@60fps visual input, and dual Gigabit Ethernet ports enable EtherCAT/CANopen protocol conversion12.
-
Safety and Reliability
- Hardware emergency stop circuit directly connected to M0 core GPIO (response delay <1ms), complying with SIL2 safety level1.
- Wide temperature design (-40℃~85℃) and 50g shock resistance, MIL-STD-810G certified24.
II. Software Protocol Stack Implementation
-
Real-time Operating System
-
Adopts Linux 6.1 kernel + RT-Preempt patch or SylixOS (ASIL-D level), with task scheduling jitter <10μs12.
-
Example code (FPGA-PID control thread):
cCopy Code
RT_TASK motor_ctrl_task; void motor_control(void *arg) { while (1) { read_sensor_data(&imu_data); pid_calculate(&ctrl_output); pwm_set_duty(ESC_CH1, ctrl_output); rt_task_wait_period(); // Hard real-time cycle 20μs } }
-
-
Motion Control Algorithms
- Supports 8-axis synchronous interpolation (trajectory error <0.1mm), integrates CODESYS V3.5 SP17 runtime system, and is compatible with IEC 61131-3 programming1.
- FPGA-accelerated PID control loop (response cycle ≤50μs), NPU (6TOPS computing power) optimizes visual SLAM (mapping frequency 30Hz)24.
III. Typical Application Scenarios
-
Industrial Robots
- Multi-axis collaborative control (e.g., welding, assembly), achieving microsecond-level pulse signal generation via FPGA, supporting EtherCAT bus expansion to 32 axes15.
-
AGV/AMR
- Fuses LiDAR and visual data (minimum detection distance 0.5m), with dynamic obstacle avoidance response time <50ms, complying with ISO 3691-4:2020 standard25.
-
Drone Flight Control
- 5G/WiFi 6E dual-redundant communication, MAVLink 2.0 protocol hardware acceleration, improving anti-packet loss rate by 80%24.
IV. Performance Comparison and Advantages
| Metric | Traditional x86 Solution | RK3576+FPGA Solution |
|---|---|---|
| Real-time Response | 500μs level | <10μs level1 |
| Multi-protocol Compatibility | Requires protocol conversion card | Natively supports EtherCAT/CANopen1 |
| Axis Control Expansion Capability | Max 4 axes | Expandable to 32 axes1 |
| Localization Rate | Relies on imported chips | 100% domestic chips2 |
This solution balances performance and real-time capability through heterogeneous computing, making it suitable for high-precision, high-dynamic industrial automation scenarios