Domestic NI Alternative: Fully Chinese-Made 16-Channel Vibration + 2-Channel Rotational Speed (24-bit) High-Precision Terminal Acquisition Board Based on Domestic FPGA + GigaDevice GD32F450
Industrial vibration monitoring has long been dominated by National Instruments (NI) hardware — reliable, but expensive and dependent on foreign supply chains. This post introduces a fully domestic alternative: a 16-channel vibration + 2-channel rotational speed terminal acquisition board built around a Chinese AG16KF256 FPGA and a GigaDevice GD32F450 ARM microcontroller, delivering 24-bit precision at a significantly lower cost and with a fully maintainable domestic software stack.
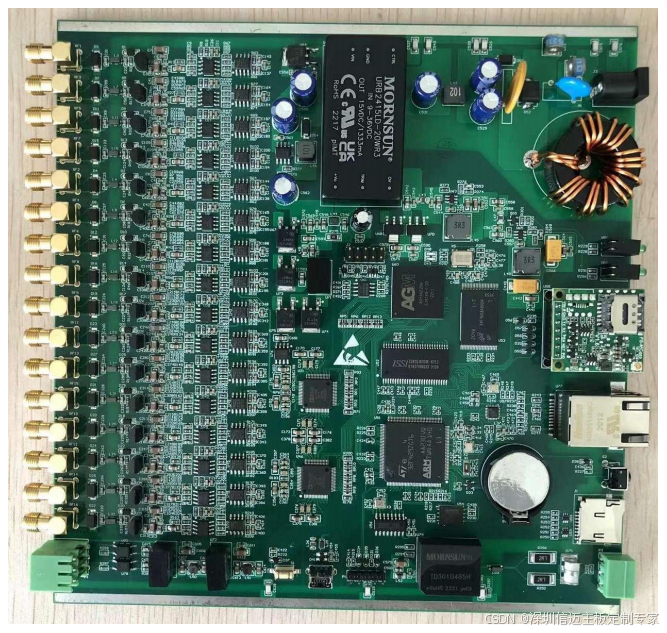

Hardware Architecture Overview
The board is a two-chip design that divides signal processing into a clear front-end / back-end split:
- Front-end (FPGA — AG16KF256): Real-time signal acquisition, anti-aliasing filtering, and decimation across all 16 vibration channels and 2 tachometer channels.
- Back-end (ARM — GigaDevice GD32F450): Feature-value extraction, FFT computation, soft-core protocol handling, and upstream data transmission.
This division of labour is the same architectural philosophy used in high-end NI DSA cards, where an FPGA handles deterministic, high-throughput front-end work that a general-purpose CPU cannot schedule reliably, while the processor handles computationally intensive but latency-tolerant analysis.
Why AG16KF256 + GD32F450?
The AG16KF256 is a mid-range domestic FPGA with 256K lookup tables (LUTs) in the Anlogic AG series. It provides sufficient fabric resources to implement 16 parallel sigma-delta decimation filter chains simultaneously — a task that would saturate a small FPGA or require an expensive DSP chip. Its domestic origin means it falls outside US Export Administration Regulations (EAR) entity-list restrictions and qualifies for local government procurement programmes.
The GigaDevice GD32F450 is a high-performance ARM Cortex-M4F microcontroller running at up to 200 MHz, with hardware floating-point and a rich set of communication peripherals. It is GigaDevice's direct domestic equivalent to the STM32F4 series, sharing near-identical register maps and peripheral layouts — which is a key reason the post explicitly notes easier code maintenance. Engineers already familiar with STM32-based HAL or bare-metal code can migrate to GD32F450 with minimal friction.
The trade-off acknowledged in the original design notes: the GD32F450 is weaker in raw compute than a T3-class processor (such as a multi-core application processor in the ARM Cortex-A family). For a terminal acquisition board whose analysis pipeline is bounded by 16-channel 24-bit FFT workloads at typical vibration bandwidths (up to ~20 kHz per channel), the Cortex-M4F at 200 MHz is sufficient. A T3-class device would add cost, thermal complexity, and a full embedded Linux software stack — unnecessary overhead for an edge acquisition node whose job is to compute features and forward packets, not run a full OS.
Signal Chain: Front-End FPGA Responsibilities
Each vibration input passes through the FPGA's acquisition pipeline:
- ADC interfacing — The FPGA clocks the 24-bit ADCs (likely sigma-delta devices given the resolution and channel count) and receives serial bit-streams from all 16 channels in parallel.
- Digital filtering — A cascaded integrator-comb (CIC) or FIR decimation filter removes out-of-band noise and reduces the sample rate from the oversampled ADC rate down to the analysis bandwidth required by the application.
- Decimation — The filtered data stream is decimated to match the output data rate, reducing the data volume that needs to be handed off to the ARM.
Because the FPGA handles all 16 channels simultaneously and deterministically, there is no channel-to-channel skew introduced by software scheduling — a critical requirement for phase-coherent multi-channel vibration analysis (e.g., cross-correlation between measurement points on a rotating machine).
The 2 tachometer channels are handled separately; rotational speed signals are typically TTL pulse trains from proximity probes or encoders, and the FPGA can measure pulse period with sub-microsecond resolution to derive RPM and provide a phase reference for order-tracked analysis.
Back-End ARM Responsibilities
Once the FPGA has decimated and filtered the data, it is transferred to the GD32F450 (likely over a parallel bus or high-speed SPI/QSPI interface). The ARM then performs:
- Feature-value calculation — Time-domain statistical features such as RMS, peak, crest factor, and kurtosis. These are the primary health indicators used in condition monitoring and are relatively cheap to compute on a Cortex-M4F with hardware FPU.
- FFT computation — Frequency-domain analysis for identifying fault frequencies (bearing defect frequencies, gear mesh frequencies, imbalance, misalignment). The GD32F450's M4F core can execute a CMSIS-DSP FFT efficiently; for 1024-point complex FFT at 200 MHz, throughput is well within the frame-rate budget for typical vibration analysis update rates.
- Protocol interfacing and data upload — The ARM runs a soft protocol stack to format results and transmit them upstream. This could be Ethernet (the board's "terminal" form factor suggests it sits close to the machine), Modbus, or a proprietary industrial protocol. The GD32F450's MAC peripheral supports 10/100 Ethernet, enabling direct TCP/IP connectivity without an additional network controller.
Positioning as a Domestic NI Alternative
NI's CompactDAQ and PXI DSA modules offer comparable channel counts and 24-bit resolution, but at a price point that makes large-scale machine fleet deployments expensive. This board targets the same measurement class — high-precision vibration and tachometer acquisition with onboard signal processing — using an entirely domestic component set:
- No exposure to foreign chip supply-chain risk
- Lower BOM cost due to domestic FPGA and MCU pricing
- Simplified software maintenance: GD32F450 code is largely compatible with existing STM32F4 codebases, lowering the barrier for Chinese industrial software teams
- Built-in feature extraction and FFT mean the host system receives processed results rather than raw waveforms, reducing network bandwidth and host CPU load
For applications in predictive maintenance, rotating machinery health monitoring, and industrial condition monitoring systems — particularly in defence-adjacent or government-procurement contexts where domestic sourcing is mandatory — this architecture presents a credible, production-ready alternative to NI's incumbent hardware.