基于ZYNQ MPSoC 在多轴伺服电机驱动器中的架构设计与工程实践
一、引言
在工业机器人、数控机床、导弹舵机、相控阵列天线、自动化产线等高精工业场景中,多轴伺服电机独立控制 + 高精度同步是核心刚需。
目前行业主流两种传统方案都存在明显瓶颈:
- 纯 DSP 软件方案:串行中断执行,单 DSP 算力有限,很难做多轴高精度控制;多 DSP 并联成本高、集成度低、轴间容易不同步。
- 纯 FPGA 硬件方案:并行实时性强,但速度环、位置环算法写死在硬件里,通用性差、参数配置与算法迭代极不灵活。
MPSoC 多处理器片上系统的出现,完美解决了以上痛点。通过ARM+FPGA/DSP 异构架构 + 软硬件协同设计,单芯片内部集成主控、多轴伺服控制、工业通信、信号采集等全部功能,兼顾高实时性、高同步精度、算法灵活性、高集成度。
本文基于学术工程实测案例 + 工业落地经验,完整拆解 MPSoC 多轴伺服架构、设计思路、实验效果、硬件平台适配,适合做运动控制、伺服 驱动 、FPGA/MPSoC 硬件开发工程师参考。
二、传统多轴伺服方案对比与痛点
2.1 三种主流方案优缺点
表格
方案类型
优点
致命缺点
单 DSP 方案
开发简单、算法灵活、成本低
串行处理实时性差,多轴同步弱,不适合高精多轴
纯 FPGA 硬件方案
并行运算、延时极低、适合电流环
速度 / 位置环算法固化,难改参数、通用性差
分立 DSP+FPGA
各司其职、性能尚可
板级连线复杂、干扰大、集成度低、体积大
2.2 行业真实诉求
- 单片芯片实现多轴独立互不干扰 + 精准同步
- 电流环微秒级低延时,速度环响应快、稳态误差小
- 软硬件可裁剪,支持后期算法升级、参数在线配置
- 原生适配 EtherCAT、CAN、以太网、编码器差分接口
正是这些需求,让MPSoC 异构架构成为多轴伺服的最优落地方案。
三、基于 MPSoC 的多轴伺服整体架构设计
3.1 核心设计思想:软硬件协同分工
这是 MPSoC 做多轴伺服最关键的设计原则:
-
FPGA 硬件逻辑做固定、高实时任务电流矢量控制、Clark/Park 逆变换、CORDIC 正余弦计算、相电流 AD 采集、编码器位置速度解算、SVPWM 波形生成。控制频率可达100kHz,延时极小。
-
ARM / 软核软件做灵活、可迭代任务速度环 PID、位置环闭环、多轴轨迹规划、上位机通信、核间数据交互、参数配置、故障逻辑。控制频率25kHz,方便改算法、调参数。
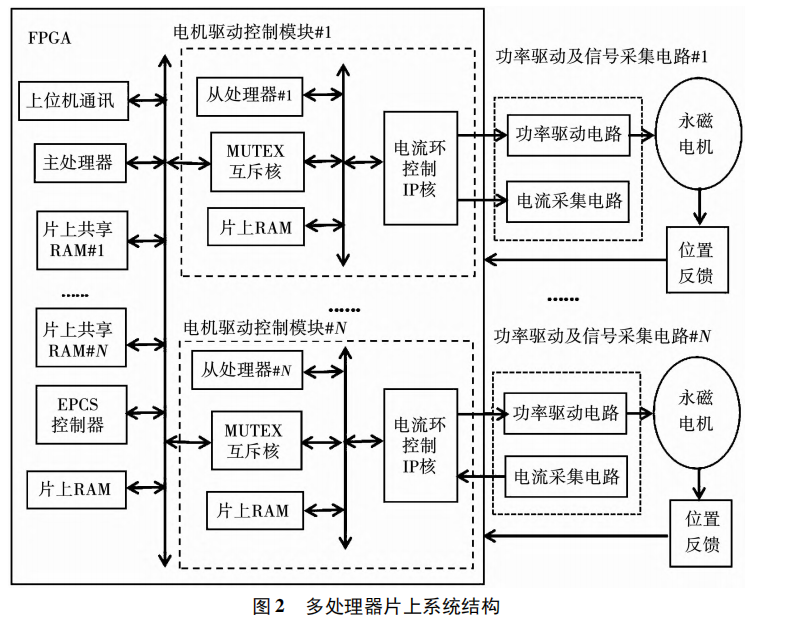
3.2 MPSoC 片上系统整体框图
plaintext
上位机通讯模块 ↓主处理器 ←→ MUTEX互斥核 ←→ 片上共享RAM ↓┌─────┬─────┬─────┐│从核1│从核2│从核N│ 多轴从处理器阵列└─────┼─────┼─────┘ ↓ ↓ ↓电流环IP1 电流环IP2 电流环IPN ↓ ↓ ↓功率驱动&信号采集 → 永磁同步电机
架构亮点
- 单片 FPGA/MPSoC 内部完成所有控制,无需外部多芯片互联;
- 每一路电机对应独立控制模块,并行运行、互不干扰;
- MUTEX 互斥核 + 共享 RAM,保证多核通信无冲突、同步精度高;
- 预留 EPCS 配置、PLL 时钟、JTAG 调试、工业网口等标准模块。
3.3 单轴伺服控制模块内部结构
单轴模块构成:从处理器 + 片上 RAM + 电流环硬件 IP 核 + 总线交互接口
- 电流环 IP:Verilog 硬件实现,模块化封装,可直接复用;
- 从处理器:C 语言开发,负责速度环 PID、中断调度、与 IP 核交互;
- 片上 RAM:存放程序、运行变量,保证实时加载与运算。
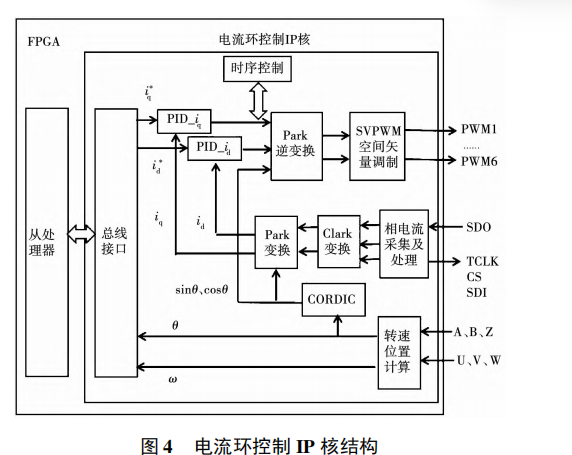
3.4 电流环 IP 核内部时序流程
采样 → 相电流处理 → Clark 变换 → Park 变换 → 电流 PID → 逆 Park → SVPWM → 输出 PWM同时并行完成:编码器解码、角度转速计算、CORDIC 正余弦求解。全程硬件流水线执行,延时远低于软件实现。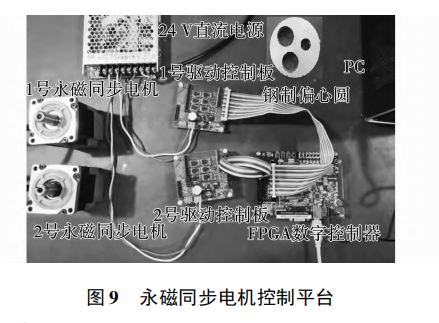
四、实验平台硬件搭建
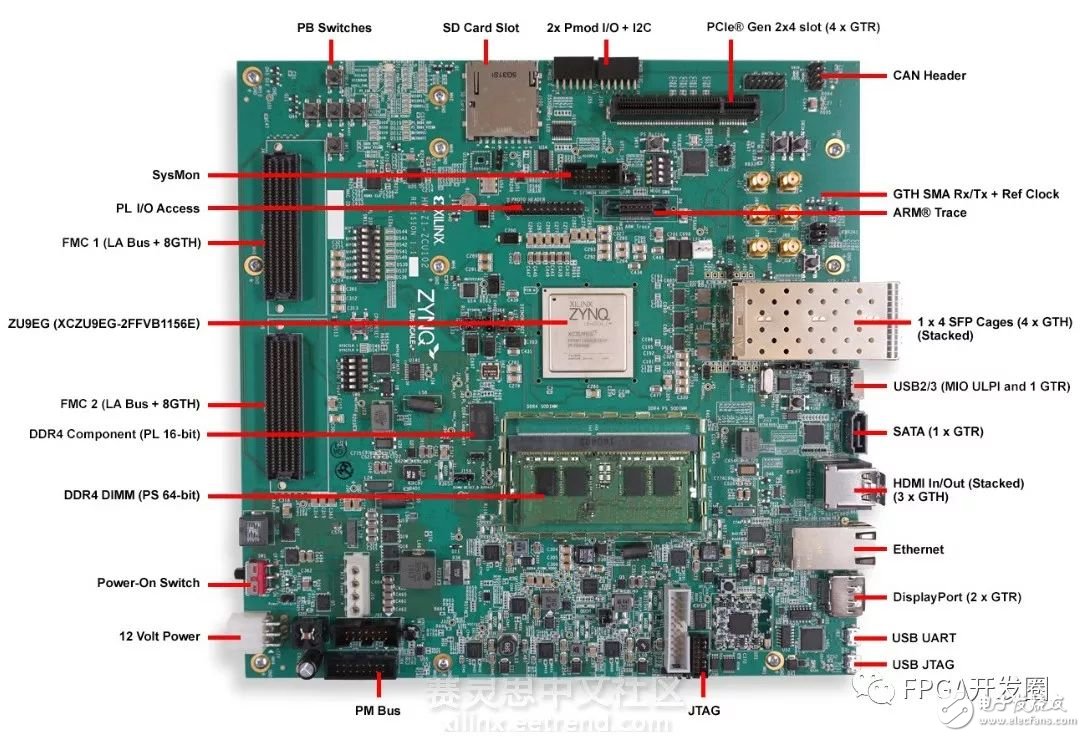
4.1 主控 MPSoC 芯片
采用Intel Cyclone V 5CEBA4F23C7N MPSoC
- 逻辑资源:49K LE
- 系统时钟:50MHz
- 双轴伺服仅占用32% 逻辑资源,余量极大,可平滑扩展 4 轴、6 轴、8 轴
同时工程上可完美兼容:Xilinx Zynq7020/7045、TI AM5728、AM62x、OMAPL138 等全系列 MPSoC/DSP+ARM+FPGA 平台。
4.2 实验硬件组成
- 伺服电机:200W 表贴式永磁同步电机
- 供电:24V 直流电源
- 外设:驱动板、电流采样电路、增量式光电编码器、钢制偏心圆负载
- 上位机:PC 用于速度曲线观测、参数调试
4.3 关键控制参数
- 电流环频率:100kHz
- 速度环频率:25kHz
- 支持轴数:2~8 轴可软件 + 硬件灵活配置
五、实测波形与性能结果
5.1 空载梯形速度响应
- 1 号轴:600r/min → 1000r/min 梯形速度
- 2 号轴:-600r/min → -200r/min 反向梯形速度
实测表现
- 速度给定与反馈曲线几乎重合,滞后极小;
- 稳态速度误差:1 号轴 0.25%,2 号轴 0.32%;
- 双轴独立运行,互不干扰,同步性优异。
5.2 带负载动态响应
加载钢制偏心圆负载,给定 ±1000r/min 转速:
- 动态响应时间:1 号轴 17.3ms,2 号轴 18.5ms;
- 带载仅有小幅超调,快速收敛;
- 稳态误差控制在 1.13%、1.35%;
- 电流环跟随迅速,无明显震荡、延时极低。
5.3 方案核心优势总结
- 高集成:单片 MPSoC 替代多片 DSP+FPGA 分立方案,设备体积大幅缩小;
- 高实时:硬件电流环微秒级延时,适合高速高精伺服;
- 易扩展:2 轴、4 轴、6 轴、8 轴可通过主板资源与逻辑配置灵活裁剪;
- 易迭代:速度环、轨迹算法在软件层开发,不用改硬件逻辑即可升级;
- 工业级可靠:适配宽温、抗干扰、EMC、工业总线组网。
六、MPSoC 多轴伺服工业主板硬件适配要点
做运动控制、伺服设备的厂商,最大痛点是自研 MPSoC 主板周期长、底层驱动复杂、接口不匹配。
从工程落地角度,MPSoC 多轴伺服专用工业主板定制重点:
-
芯片选型定制基于 Zynq、Cyclone、TI AM5728/AM62x/OMAPL138 等,按需做核心板 + 底板架构,匹配 2~16 轴伺服控制。
-
接口按需定义预留差分编码器接口、高速 AD 电流采集、PWM 驱动接口、EtherCAT 千兆网、CAN-FD、RS485、多串口多网口。
-
资源与成本裁剪按轴数匹配 DDR、eMMC、FPGA 逻辑资源,不浪费硬件性能,控制整机成本。
-
工业级可靠性-40℃~+85℃宽温、抗震抗振、双电源冗余、EMC 电磁兼容,满足机床、机器人、轨道交通、电力行业规范。
-
软硬件一站式交付适配 Linux/RT-Linux/TI-RTOS 实时系统、底层驱动、多核通信框架,客户只需专注上层运动控制算法和应用逻辑,研发周期从 1~2 年压缩到 3 个月以内。
目前这类 MPSoC 异构主板已批量落地:六轴工业机器人、EtherCAT 运动控制器、数控机床、AGV 物流机器人、精密检测设备等多轴伺服场景。
七、结语
MPSoC 异构架构凭借软硬件协同分工、单芯片高集成、实时性强、可灵活拓展,已经成为多轴伺服驱动的主流技术路线。
把固定高实时算法放在 FPGA 硬件、复杂可迭代算法放在 ARM/DSP 软件,既保证了控制延时与同步精度,又保留了算法升级和参数灵活配置的能力。
对于工业自动化、运动控制、伺服设备厂商而言,基于成熟 MPSoC 工业主板做二次开发,是降成本、缩周期、提稳定性的最优选择。
信迈提供ZYNQ MPSOC主板方案与生产。