基于 MPSoC 的无人驾驶多传感器融合定位硬件平台设计与实现
一、引言
无人驾驶高精度定位是环境感知、路径规划、车辆运动控制的前置核心环节,定位精度与时序同步性能直接决定自动驾驶 系统 的可靠性与安全性。现阶段主流定位方案多采用多模块分离架构:多传感器数据采集依赖独立硬件板卡,定位解算与算法加速依托工控机、GPU 或高端 CPU 实现。
这种分离式架构存在诸多工程短板:多模块硬件互联造成系统集成度低、结构体积偏大;板间通信存在传输时延,难以实现多传感器微秒级时间同步;通用计算平台功耗偏高、发热量大,难以满足车载宽温、低功耗、车规级应用约束。
MPSoC 集成 ARM 处理器与可编程 FPGA 逻辑于单芯片,具备软硬件协同并行计算能力:FPGA 适合高精度时序控制、多传感器同步采集与算法硬件加速;ARM 擅长系统调度、数据融合与任务管理。基于 MPSoC 构建一体化定位硬件平台,可实现多传感器同步采集、时间基准建立、定位算法加速高度集成,是解决当前无人驾驶定位硬件瓶颈的有效技术路径。
本文依托多传感器定位理论与 MPSoC 异构架构特性,完成无人驾驶高精度定位硬件平台整体方案设计、电路模块化开发、嵌入式软件移植与功能性能测试,同时结合工业工程实践,探讨 MPSoC 无人驾驶定位主板的定制设计思路与工程落地要点,可为同类导航定位硬件开发提供参考。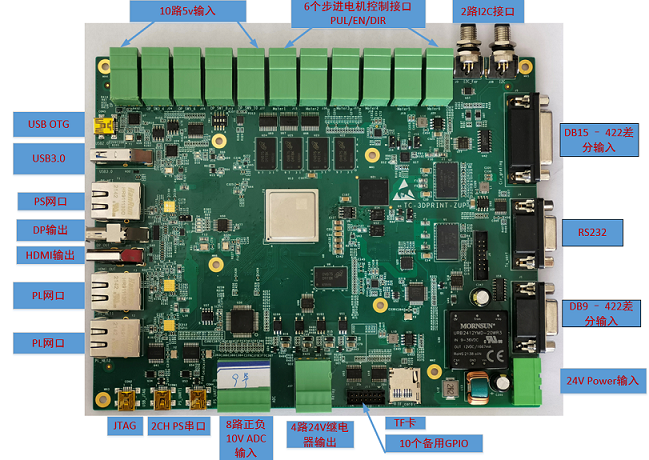
二、无人驾驶多传感器定位总体方案
2.1 系统传感器组成
本定位系统采用GNSS+IMU + 三维激光雷达 + 车轮编码器多源融合架构,各传感器功能互补:
- GNSS:提供全局绝对位置信息,输出 PPS 秒脉冲与 NEMA 授时数据,作为系统时间基准源头;
- IMU 惯性测量单元:高频输出三轴加速度与角速度,弥补卫星信号遮挡场景下定位中断问题;
- 三维激光雷达:实时采集环境点云数据,通过地图匹配实现高精度相对定位;
- 车轮编码器:输出车轮转角脉冲,用于航迹推算与车辆运动状态校验。
多传感器时间同步与空间配准是融合定位的前提,只有保证各传感数据时序对齐,才能有效提升组合定位精度与鲁棒性。
2.2 MPSoC 异构任务划分
采用 PS(处理系统)与 PL(可编程逻辑)分工协作架构,遵循实时任务硬件化、复杂任务软件化设计原则:
- **PL 端(FPGA)**搭建系统高精度时间基准,完成 GNSS PPS 脉冲解析、高稳晶振时钟校准;实现 IMU、编码器硬件同步采集,完成串口时序控制、数据缓存与 AXI 总线数据交互;承担定位相关算法流水线硬件加速。
- **PS 端(ARM)**运行嵌入式 Linux 系统,负责任务调度、外设管理;实现激光雷达点云数据接收与解析、多传感器数据融合解算;完成上位机通信、参数配置与数据存储日志管理。
2.3 平台总体架构框图
整体采用传感器层→硬件接口层→MPSoC 异构处理层→应用解算层层级架构,所有传感信号经调理电路接入 MPSoC,由 PL 端完成同步授时与原始数据采集,PS 端完成算法解算与定位输出,架构紧凑、链路简洁,规避分立架构的时序延迟与电磁干扰问题。
三、硬件平台总体设计
3.1 主控芯片选型
平台选用 Xilinx Zynq UltraScale + 系列 MPSoC 作为主控,同时兼容 Zynq7000、TI AM5728/AM62x 等工业级异构处理器。芯片集成多核 ARM A53 与 R5 实时处理核,搭载大容量可编程逻辑资源,原生支持 DDR4、千兆以太网、USB3.0、mSATA、高速串口等外设接口,工作温度覆盖 - 40℃~+85℃,满足车载与工业无人设备长期稳定运行要求。
3.2 硬件模块化设计
硬件平台采用模块化分层设计,划分为五大功能单元:
- 主控最小系统模块包含 MPSoC 主控、DDR4 高速内存、eMMC 固态存储、配置电路、高稳晶振与实时时钟单元,为系统提供稳定运行基底与时钟基准。
- 传感器接口模块设计 IMU、GNSS、激光雷达、编码器专用信号调理电路,完成差分电平转换、信号整形、隔离防护,适配各传感器电气接口标准。
- 电源管理模块支持 20~36V 车载宽压输入,集成过压、欠压、反接保护电路,按照 MPSoC 上电时序设计多路 DC/DC 电压转换,输出 1.2V、1.8V、3.3V、5V 等稳定电压,保障各模块可靠上电。
- 高速通信与存储模块配置双千兆网口、USB3.0、mSATA、SD 卡等接口,满足激光点云大数据传输、系统镜像存储、定位日志记录需求。
- 调试扩展模块引出 JTAG 调试接口、串口调试口、状态指示灯与预留 GPIO 扩展引脚,便于硬件调试、固件升级与功能拓展。
3.3 高精度时间基准设计
系统采用GNSS PPS 脉冲 + 高稳晶振联合授时方案:利用 GNSS 长时授时稳定性、高稳晶振短期低漂移特性,在 PL 端构建微秒级时间计数器;正常工况下通过 PPS 脉冲实时校准本地时钟,卫星遮挡无 PPS 信号时,依靠高稳晶振维持系统时间基准。
针对不同传感器特性,分别采用主动同步、被动同步、授时同步三种模式: IMU 采用触发式主动同步,车轮编码器为脉冲被动同步,激光雷达采用 PPS 授时同步,实现全传感时序统一,时间同步精度可达微秒级。
四、核心电路模块设计
4.1 电源电路设计
电源电路采用分级防护与时序供电设计,前端加入 EMI 滤波与防反接保护,后端通过多通道电源芯片生成各路内核与外设电压。严格遵循 MPSoC 上电顺序,避免因上电紊乱导致芯片异常锁死,同时增加负载限流与温感防护,适配车载复杂电气环境。
4.2 传感器接口电路
IMU 采用 RS422 差分接口设计,通过电平转换芯片适配 FPGA IO 电平,保证长距离传输抗干扰能力;GNSS 预留串口与 PPS 双路独立接口,做电气隔离设计,避免授时信号畸变;车轮编码器差分脉冲经施密特触发器整形滤波,抑制高频干扰;激 光 雷达直连千兆 PHY 芯片,满足大带宽点云实时传输需求。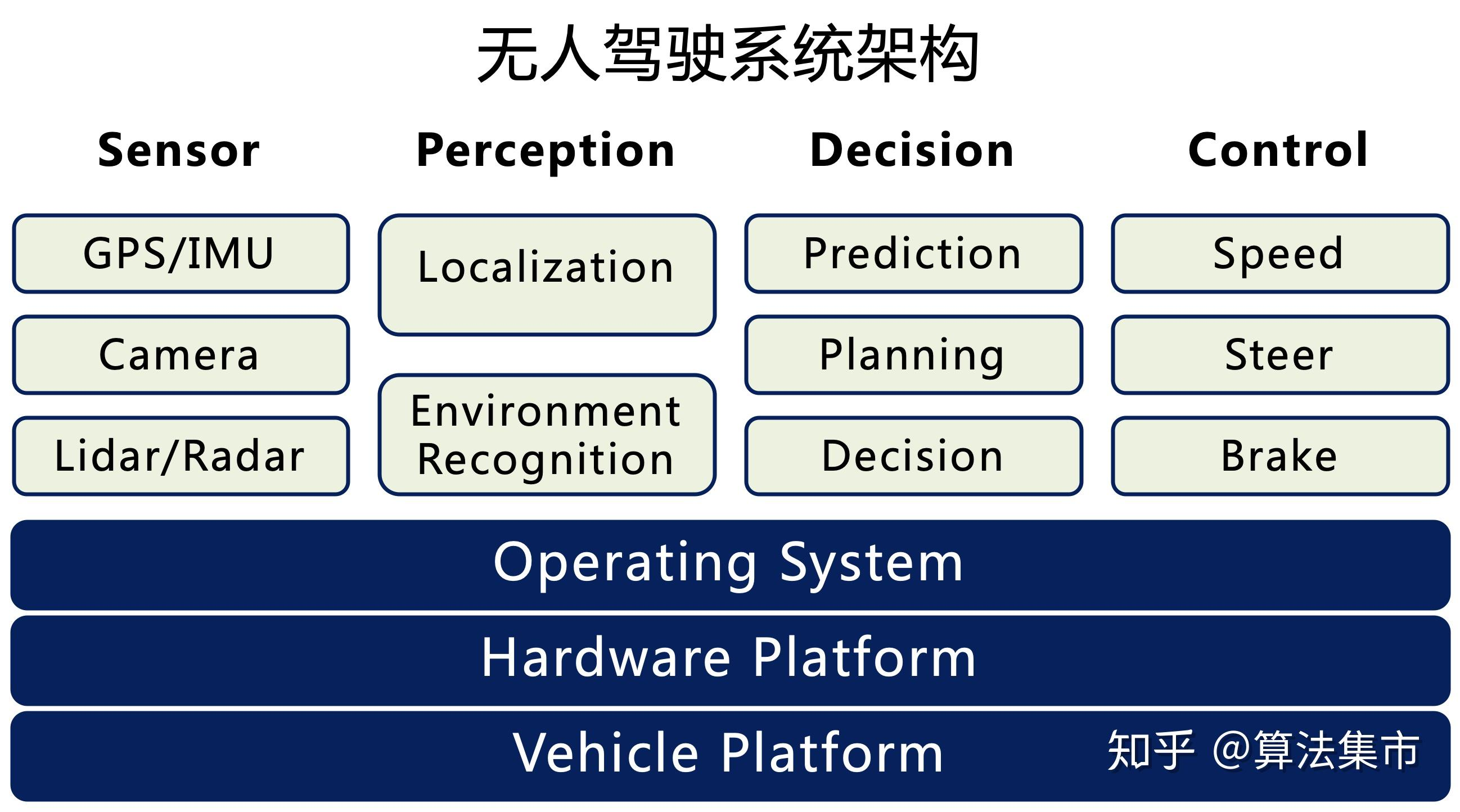
4.3 高速接口电路
千兆以太网采用工业级 PHY 器件,遵循 RGMII 布线规则,做阻抗匹配与等长走线,保证高速通信稳定性;DDR4 内存严格按照高速 PCB 设计规范,控制走线阻抗、长度与间距,保障大数据读写可靠性;mSATA 与 USB3.0 接口增加静电防护器件,提升工业环境适配能力。
五、嵌入式软件设计与移植
5.1 Linux 系统定制与移植
基于 Petalinux 开发环境,完成嵌入式 Linux 系统裁剪与定制配置。根据硬件外设资源适配设备树,配置内核驱动、文件系统与启动方式,支持 SD 卡、QSPI 闪存双启动模式。完成 PS 与 PL 通信协议配置,搭建多核任务调度框架,适配定位算法实时运行需求。
5.2 FPGA PL 端逻辑设计
采用 Verilog HDL 进行逻辑开发,主要实现:高精度时间基准计数与 PPS 脉冲校准逻辑;多传感器状态机时序采集;串口指令解析、FIFO 数据缓存;AXI 总线协议适配,实现 PL 向 PS 的高速数据传输。整体采用模块化状态机设计,逻辑资源占用合理,时序收敛性良好。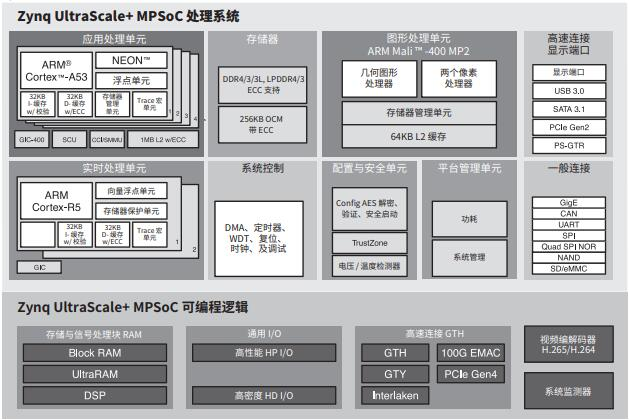
5.3 ARM PS 端应用软件设计
PS 端软件实现分层架构:底层为串口、网口、传感器驱动;中层为数据解析与时序对齐模块;上层为多传感器融合算法、定位解算、上位机交互与数据存储。软件采用多任务分时调度,保障定位任务实时性,同时支持参数在线配置与日志离线存储。
六、系统功能与性能测试
6.1 基础功能测试
搭建实验室静态测试平台,接入激光雷达、IMU、GNSS、车轮编码器完成整机联调。测试结果表明:各硬件接口工作正常,PS 与 PL 指令交互可靠,多传感器可同步上电、稳定采集原始数据,无丢包、无时序错乱现象,系统软硬件工作状态稳定。
6.2 时间同步精度测试
通过示波器对比 GNSS 标准 PPS 与系统本地时钟信号边沿偏差,正常卫星锁定工况下,时间同步误差控制在微秒级;无 GNSS 信号连续 4 小时工作状态下,系统累积时间误差小于 140μs,相对时序仍保持高精度,满足多传感器融合定位时序要求。
6.3 算法加速性能测试
以激光点云特征提取算法为测试对象,分别在本 MPSoC 平台、嵌入式 GPU 平台、桌面级 CPU 平台进行对比测试。结果表明:MPSoC 依托 FPGA 硬件流水线加速,运算效率接近桌面级 CPU,同时整机功耗远低于通用计算平台,具备低功耗、高算力的双重优势,适合无人设备嵌入式部署。
6.4 平台应用优势
- 高集成度:单 MPSoC 芯片整合采集、授时、解算、加速功能,省去多板卡分立设计,缩减设备体积;
- 高时序精度:微秒级多传感器时间同步,有效提升融合定位精度;
- 低功耗车规适配:异构架构算力按需调度,宽温抗干扰设计适配车载与户外无人场景;
- 软硬件可裁剪:PL 逻辑、PS 软件、外设接口均可按项目需求定制裁剪;
- 算法易迭代:定位算法部署于 ARM 端,无需改动硬件逻辑即可完成升级优化。
七、MPSoC 无人驾驶定位主板定制工程实践
从工程产业化角度,无人驾驶、AGV 巡检车、农机自动驾驶、电力巡检机器人等设备,均需要定制化 MPSoC 硬件平台支撑。依托多年工业主板开发经验,可基于 Zynq、TI、Intel 全系列 MPSoC 芯片,提供从方案评估、原理图 PCB、软硬件开发到批量生产的全流程定制服务。
- 芯片方案定制可根据定位精度、算力需求、成本预算,适配 Zynq 7000/UltraScale+、TI AM5728/AM62x 等异构平台,定制核心板与整板方案。
- 接口按需定制可定制激光雷达千兆口、IMU/GNSS 差分串口、编码器接口、CAN/RS485、5G 拓展、多路网口等专用外设,匹配不同传感与组网需求。
- 工业级可靠性设计支持 - 40℃~+85℃宽温、抗震三防、双电源冗余、EMC 电磁兼容设计,符合车载与工业控制安规标准。
- 软硬件一站式交付提供 Linux/Petalinux 系统移植、底层驱动开发、PL 逻辑设计、多传感器同步框架适配,客户可专注上层定位算法与应用开发,大幅缩短项目研发周期。
八、结语
本文基于 MPSoC 异构架构,完成无人驾驶多传感器融合定位硬件平台的方案设计、电路开发、软件移植与性能测试,解决了传统分立定位平台集成度低、时序同步差、功耗偏高的工程难题。利用 FPGA 高实时时序控制与 ARM 灵活算法调度的优势,实现多传感器微秒级同步采集与定位算法硬件加速,平台稳定性与精度均满足无人驾驶、智能导航设备应用需求。
随着自动驾驶与户外无人设备产业化推进,定制化 MPSoC 工业主板已成为硬件研发主流选择。标准化核心板 + 定制底板的开发模式,能够快速适配不同场景的多传感器定位需求,为无人设备硬件降本增效、缩短上市周期提供可靠支撑。
信迈提供MPSOC定制与生产。