When and Where are Network Hardware Timestamps Applied?
This post is divided into several sections:
- Linux Time System
- Network Card Working Principle
- Hardware Timestamp Options in Socket Programming
- When and Where are Network Hardware Timestamps Applied?
1. Linux Time System
Chen Lijun's "In-depth Analysis of Linux Kernel Source Code" includes an excellent article: Linux Time System
Linux has two clock sources: RTC and OS clock.
The RTC (Real-Time Clock) is independent of the operating system and powered by a battery, allowing it to maintain its time even when the system is powered off. The Linux system obtains its initial time value from the RTC during startup.
The OS clock obtains its timing from a programmable counter (such as Intel's 8524). The output pulses shown in Figure 1 form the basis of the OS clock's operation, as they generate clock interrupts.
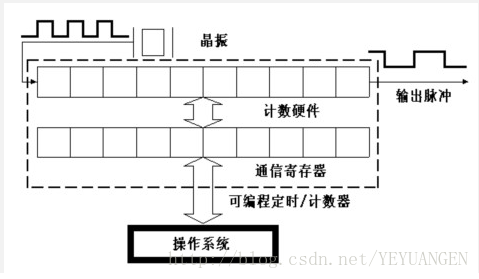
Figure 1: 8524 Operation Diagram
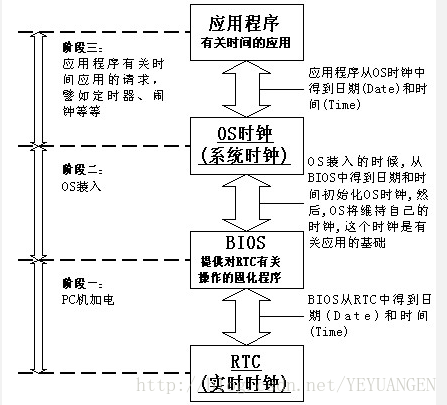
Figure 1: Clock Mechanism
2. Network Card Working Principle
When sending data, the network card first listens for a carrier on the medium (indicated by voltage). If a carrier is detected, it assumes other stations are transmitting information and continues to listen. Once the communication medium is quiet for a certain period (known as the Interframe Gap, IFG = 9.6 microseconds), meaning it's not occupied by other stations, it begins transmitting frame data while simultaneously continuing to listen to the medium to detect collisions. During data transmission, If a collision is detected, transmission is immediately stopped, and a "jam" signal is sent to the medium, informing other stations that a collision has occurred. This causes any potentially corrupted frame data being received to be discarded. The station then waits for a random period (the CSMA/CD algorithm for determining wait time is binary exponential backoff). After waiting for a random period, a new transmission attempt is made. If collisions persist after multiple retransmissions (more than 16 times), the transmission is abandoned. When receiving, the network card examines each frame transmitted on the medium. If a frame's length is less than 64 bytes, it is considered a collision fragment. If the received frame is not a collision fragment and its destination address is local, its integrity is checked. If the frame length is greater than 1518 bytes (known as a jumbo frame, potentially caused by an erroneous LAN driver or interference) or fails CRC validation, the frame is considered malformed. Frames that pass validation are deemed valid, and the network card receives them for local processing.
Linux Network Card Driver Framework
3. Hardware Timestamp Options in Socket Programming
Reference article: Hardware Timestamp Socket Option Analysis
The existing interfaces for getting network packages time stamped are:
* SO_TIMESTAMP Generate time stamp for each incoming packet using the (not necessarily monotonous!) system time. Result is returned via recv_msg() in a control message as timeval_r(usec resolution).
* SO_TIMESTAMPNS Same time stamping mechanism as SO_TIMESTAMP, but returns result as timespec (nsec resolution).
* IP_MULTICAST_LOOP + SO_TIMESTAMP[NS] Only for multicasts: approximate send time stamp by receiving the looped packet and using its receive time stamp.
The following interface complements the existing ones: receive time stamps can be generated and returned for arbitrary packets and much closer to the point where the packet is really sent. Time stamps can be generated in software (as before) or in hardware (if the hardware has such a feature).
SO_TIMESTAMPING:
Instructs the socket layer which kind of information is wanted. The parameter is an integer with some of the following bits set. Setting other bits is an error and doesn't change the current state.
SOF_TIMESTAMPING_TX_HARDWARE: try to obtain send time stamp in hardware SOF_TIMESTAMPING_TX_SOFTWARE: if SOF_TIMESTAMPING_TX_HARDWARE is off or fails, then do it in software SOF_TIMESTAMPING_RX_HARDWARE: return the original, unmodified time stamp as generated by the hardware SOF_TIMESTAMPING_RX_SOFTWARE: if SOF_TIMESTAMPING_RX_HARDWARE is off or fails, then do it in software SOF_TIMESTAMPING_RAW_HARDWARE: return original raw hardware time stamp SOF_TIMESTAMPING_SYS_HARDWARE: return hardware time stamp transformed to the system time base SOF_TIMESTAMPING_SOFTWARE: return system time stamp generated in software
SOF_TIMESTAMPING_TX/RX determine how time stamps are generated. SOF_TIMESTAMPING_RAW/SYS determine how they are reported in the following control message:
struct scm_timestamping { struct timespec systime; struct timespec hwtimetrans; struct timespec hwtimeraw; };
recvmsg() can be used to get this control message for regular incoming packets. For send time stamps the outgoing packet is looped back to the socket's error queue with the send time stamp(s) attached. It can be received with recvmsg(flags=MSG_ERRQUEUE). The call returns the original outgoing packet data including all headers preprended down to and including the link layer, the scm_timestamping control message and a sock_extended_err control message with ee_errno==ENOMSG and ee_origin==SO_EE_ORIGIN_TIMESTAMPING. A socket with such a pending bounced packet is ready for reading as far as select() is concerned. If the outgoing packet has to be fragmented, then only the first fragment is time stamped and returned to the sending socket.
All three values correspond to the same event in time, but were generated in different ways. Each of these values may be empty (= all zero), in which case no such value was available. If the application is not interested in some of these values, they can be left blank to avoid the potential overhead of calculating them.
systime is the value of the system time at that moment. This corresponds to the value also returned via SO_TIMESTAMP[NS]. If the time stamp was generated by hardware, then this field is empty. Otherwise it is filled in if SOF_TIMESTAMPING_SOFTWARE is set.
hwtimeraw is the original hardware time stamp. Filled in if SOF_TIMESTAMPING_RAW_HARDWARE is set. No assumptions about its relation to system time should be made.
hwtimetrans is the hardware time stamp transformed so that it corresponds as good as possible to system time. This correlation is not perfect; as a consequence, sorting packets received via different NICs by their hwtimetrans may differ from the order in which they were received. hwtimetrans may be non-monotonic even for the same NIC. Filled in if SOF_TIMESTAMPING_SYS_HARDWARE is set. Requires support by the network device and will be empty without that support.
SIOCSHWTSTAMP:
Hardware time stamping must also be initialized for each device driver that is expected to do hardware time stamping. The parameter is defined in /include/linux/net_tstamp.h as:
struct hwtstamp_config { int flags; int tx_type; int rx_filter; };
Desired behavior is passed into the kernel and to a specific device by calling ioctl(SIOCSHWTSTAMP) with a pointer to a struct ifreq whose ifr_data points to a struct hwtstamp_config. The tx_type and rx_filter are hints to the driver what it is expected to do. If the requested fine-grained filtering for incoming packets is not supported, the driver may time stamp more than just the requested types of packets.
A driver which supports hardware time stamping shall update the struct with the actual, possibly more permissive configuration. If the requested packets cannot be time stamped, then nothing should be changed and ERANGE shall be returned (in contrast to EINVAL, which indicates that SIOCSHWTSTAMP is not supported at all).
Only a processes with admin rights may change the configuration. User space is responsible to ensure that multiple processes don't interfere with each other and that the settings are reset.
enum { HWTSTAMP_TX_OFF,
HWTSTAMP_TX_ON, };
enum { HWTSTAMP_FILTER_NONE,
HWTSTAMP_FILTER_ALL,
HWTSTAMP_FILTER_SOME,
HWTSTAMP_FILTER_PTP_V1_L4_EVENT,
};
DEVICE IMPLEMENTATION
A driver which supports hardware time stamping must support the SIOCSHWTSTAMP ioctl and update the supplied struct hwtstamp_config with the actual values as described in the section on SIOCSHWTSTAMP.
Time stamps for received packets must be stored in the skb. To get a pointer to the shared time stamp structure of the skb call skb_hwtstamps(). Then set the time stamps in the structure:
struct skb_shared_hwtstamps { ktime_t hwtstamp; ktime_t syststamp; };
Time stamps for outgoing packets are to be generated as follows:
- In hard_start_xmit(), check if skb_tx(skb)->hardware is set no-zero. If yes, then the driver is expected to do hardware time stamping.
- If this is possible for the skb and requested, then declare that the driver is doing the time stamping by setting the field skb_tx(skb)->in_progress non-zero. You might want to keep a pointer to the associated skb for the next step and not free the skb. A driver not supporting hardware time stamping doesn't do that. A driver must never touch sk_buff::tstamp! It is used to store software generated time stamps by the network subsystem.
- As soon as the driver has sent the packet and/or obtained a hardware time stamp for it, it passes the time stamp back by calling skb_hwtstamp_tx() with the original skb, the raw hardware time stamp. skb_hwtstamp_tx() clones the original skb and adds the timestamps, therefore the original skb has to be freed now. If obtaining the hardware time stamp somehow fails, then the driver should not fall back to software time stamping. The rationale is that this would occur at a later time in the processing pipeline than other software time stamping and therefore could lead to unexpected deltas between time stamps.
- If the driver did not call set skb_tx(skb)->in_progress, then dev_hard_start_xmit() checks whether software time stamping is wanted as fallback and potentially generates the time stamp.
4. How Linux Obtains High-Precision Time
In Linux, the highest precision time